



 制御工学
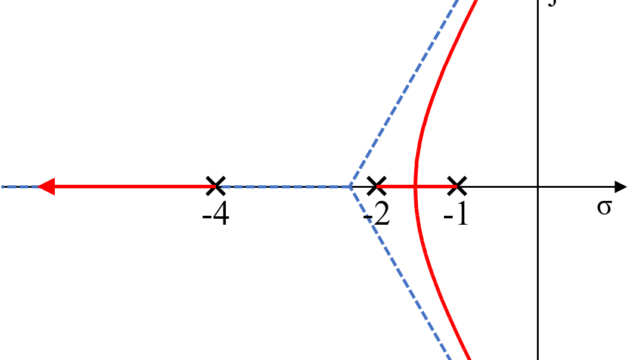
制御工学フィードバックシステムの伝達関数から根軌跡を描く
2018-04-12 tajima Tajima Robotics
前回までの記事では、フィードバックシステムの伝達関数から根軌跡を描くために必要となる根軌跡のルールを紹介しました。 https … 制御工学根軌跡を描くためのルール(その2)
2018-04-11 tajima Tajima Robotics
前回の記事から引き続き、実際に根軌跡を描くために必要となる根軌跡を描くためのルールを紹介していきたいと思います。 https://tajimarobotics.com … 制御工学根軌跡を描くためのルール
2018-04-11 tajima Tajima Robotics
前回の記事では、対象の点が根軌跡上に存在するかしないかを根軌跡の特徴を用いて求める方法を紹介しました。 https://tajimarobotics.com/root …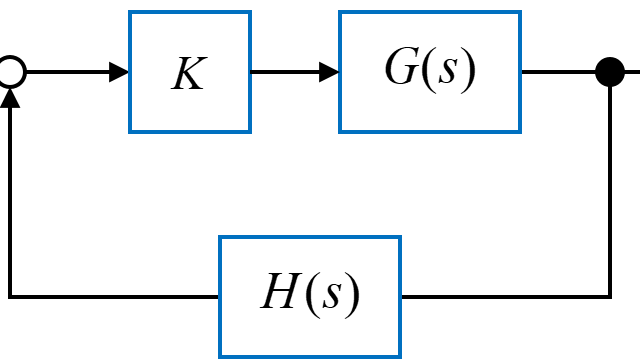 制御工学
制御工学根軌跡を構成する伝達関数の極の位置
2018-04-08 tajima Tajima Robotics
前回の記事では、制御システムのパラメータが変化した際の伝達関数の極の動きを求めて根軌跡を求めました。 https://tajimarobotics.com/root- … 制御工学フィードバックシステムと伝達関数の極と根軌跡
2018-04-04 tajima Tajima Robotics
高い次数の伝達関数を含む複雑なフィードバックシステムの特性を根軌跡によって可視化することが出来ます。 https://tajimarobotics.com/intro …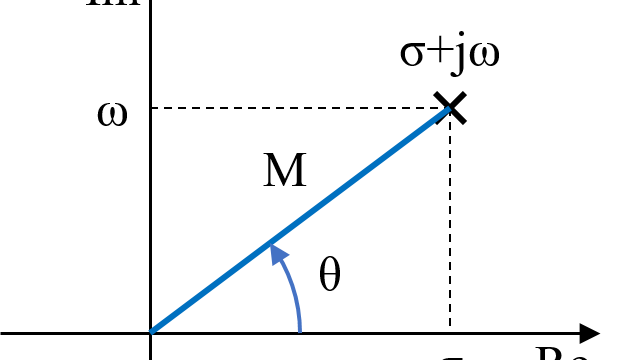 制御工学
制御工学根軌跡で制御システムを設計する
2018-04-03 tajima Tajima Robotics
根軌跡を用いることで、取り扱いが難しい高い次数の伝達関数を含む複雑なフィードバックシステムの特性を可視化することができます。 今回は、根軌跡についてとその利点 …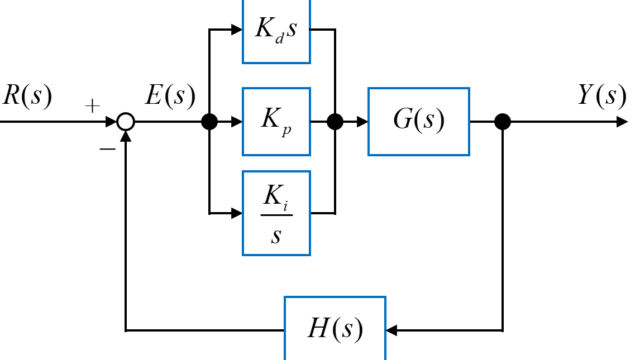 制御工学
制御工学PID制御とシステムの安定性:フィードバックシステムを安定に制御する
2018-03-31 tajima Tajima Robotics
これまでの記事では、P制御とPD制御そしてPI制御を用いて、制御対象の3次系システムをフィードバック制御する際に、システムの安定性を …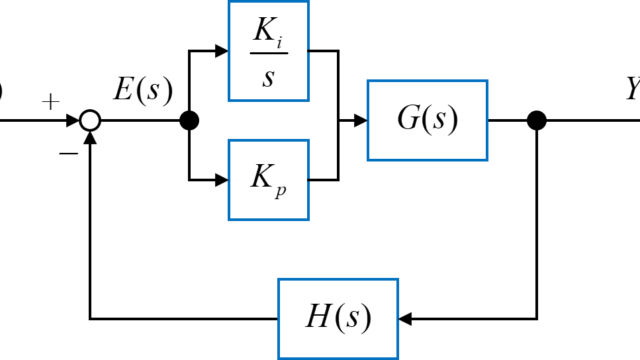 制御工学
制御工学PID制御とシステムの安定性:フィードバックシステムを安定にPI制御する
2018-03-29 tajima Tajima Robotics
前回までの記事では、P制御とPD制御を用いたフィードバックシステムについて、システムの安定性を保てる制御ゲインの範囲を算出する方法を … 制御工学
制御工学PID制御とシステムの安定性:フィードバックシステムを安定にPD制御する
2018-03-28 tajima Tajima Robotics
前回の記事では、P制御を用いて制御対象の3次系システムをフィードバック制御する際に、システムの安定性を保てる制御系内のゲインの範囲を …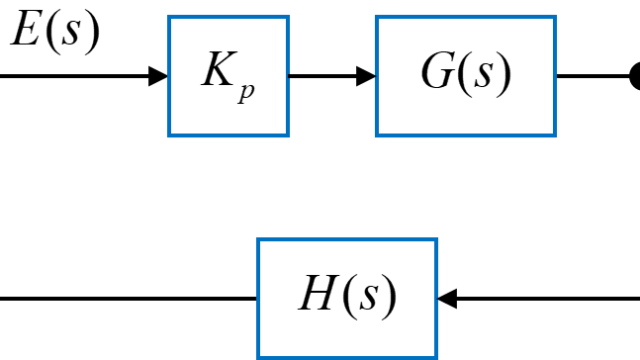 制御工学
制御工学PID制御とシステムの安定性:フィードバックシステムを安定にP制御する
2018-03-27 tajima Tajima Robotics
PID制御とは、フィードバックを含んで構成されている古典制御の内の一つです。 https://tajimarobotics.c …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
