



 ロボット工学
ロボット工学入力ありの質量-ばね-ダンパーモデルの運動を求める
2017-12-21 tajima Tajima Robotics
今回は、質量-ばね-ダンパーモデルを用いて、入力として力が質量に与えられている場合のシステムの運動を考えます。 入力が …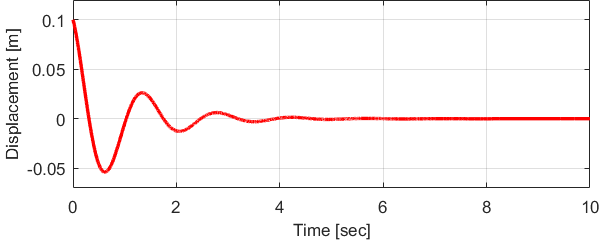 ロボット工学
ロボット工学実際に質量-ばね-ダンパーシステムの運動を計算する
2017-12-20 tajima Tajima Robotics
今回は質量-ばね-ダンパーシステムについて、例を用いて実際に値を計算していきたいと思います。 質量-ばね-ダンパーシス … ロボット工学質量-ばね-ダンパーシステムの運動を求める
2017-12-19 tajima Tajima Robotics
今回は質量-ばね-ダンパーシステム(Damped Mass Spring System)を用いて、モデルの振動(運動)について考えていきたいと思います。 シン …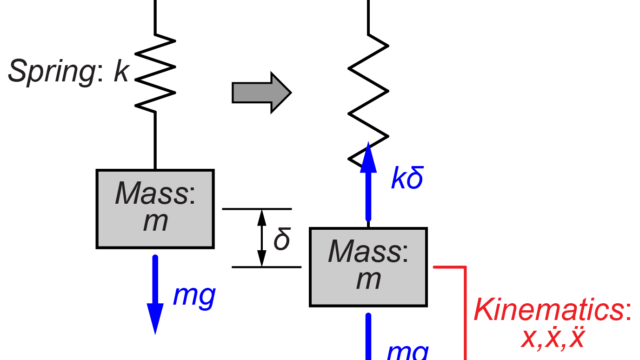 ロボット工学
ロボット工学鉛直方向の質量-ばねシステムの振動を求める
2017-12-18 tajima Tajima Robotics
前回は横向き(水平方向)の質力-ばねシステムの振動について紹介しました。 https://tajimarobotics.com/mass-spring-vibrati …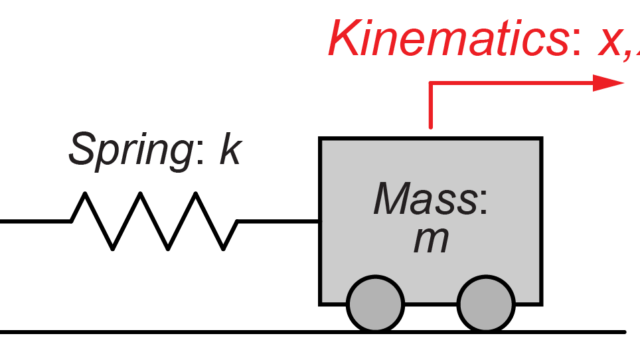 ロボット工学
ロボット工学質量-ばねシステムの振動を求める
2017-12-17 tajima Tajima Robotics
今回はシンプルな質量-ばねシステム(Mass Spring System)を用いて、このモデルの振動について算出していきたいと思います。 質量-ばねシステムの運動 …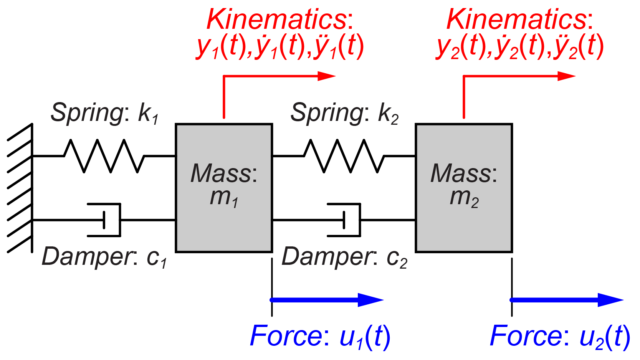 ロボット工学
ロボット工学MIMO系システムの状態空間モデルから伝達関数行列を求める
2017-12-16 tajima Tajima Robotics
MIMO系の状態空間モデル(状態方程式)から伝達関数を求める方法を紹介します。 今回もMIMOシステムの例とし … ロボット工学伝達関数でMIMOシステム(2質量系)を表す
2017-12-15 tajima Tajima Robotics
今回はこれまで求めてきたMIMOシステムの運動方程式を基に、2質量系モデルの伝達関数を実際に求めていきます。 2質量系モデルの伝達関数ついての詳細は、この記事 … ロボット工学状態方程式で2質量システム(MIMOシステム)を表す
2017-12-15 tajima Tajima Robotics
前回算出した運動方程式を用いて、2質量系モデルの状態方程式を求めていきます。 運動方程式を算出した前回の記事はこちら。 … ロボット工学2質量システム(MIMOシステム)の運動方程式を求める
2017-12-13 tajima Tajima Robotics
MIMO系の状態方程式(状態空間モデル)や伝達関数について、実際に例題を解きながら求めていきたいと思います。 MIMO …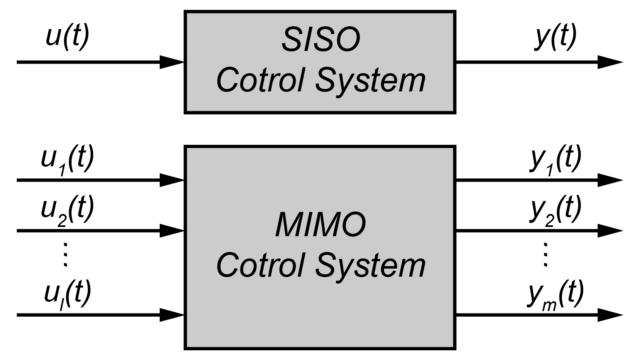 ロボット工学
ロボット工学多入力・多出力のシステム MIMO系の伝達関数と状態方程式(状態空間モデル)
2017-12-12 tajima Tajima Robotics
入力数と出力数が各々1つのシステムをSISI(Single Input Single Output)系と言います。 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
