



 ロボット技術
ロボット技術2リンクロボットアームの可操作性楕円体を求めるMATLABプログラムの作成
2020-04-04 tajima Tajima Robotics
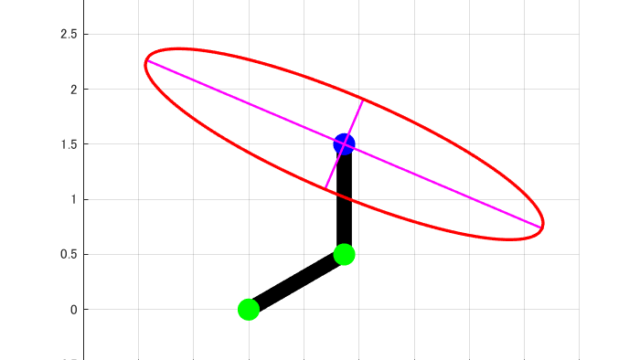
可操作性楕円体により、ロボットの動かしやすさを表すことが出来ます。 https://tajimarobotics.com/manipu … ロボット技術実際に2リンクモデルの可操作性楕円体を求める方法を紹介する
2020-04-04 tajima Tajima Robotics
可操作性楕円体を用いることで、ロボットの動かしやすさを表すことが出来ます。 https://tajimarobotics.co …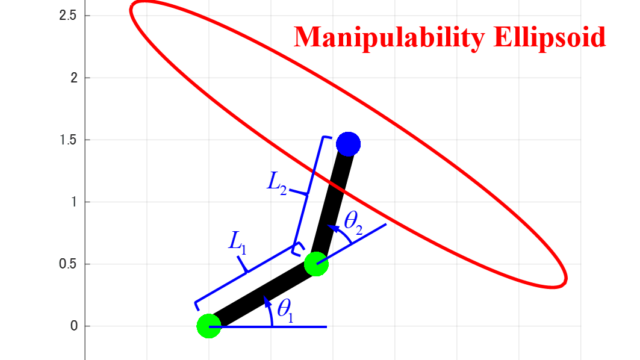 ロボット技術
ロボット技術2リンクモデルの可操作性楕円体の大きさを固有値の一般解から求める
2020-03-28 tajima Tajima Robotics
これまでの記事では、ロボットの手先の動かしやすさ示す可操作性楕円体について紹介しています。 https://tajimarob … ロボット技術2リンクモデルの可操作性楕円体を求めてみよう
2020-03-15 tajima Tajima Robotics
可操作性楕円体を用いることで、ロボットの手先がどの方向にどれくらい動かしやすいかが分かります。 https://tajimarobotics.com/manipula …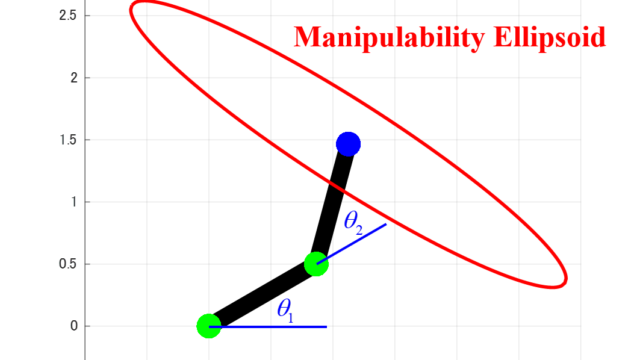 ロボット技術
ロボット技術ロボットの可操作性楕円体とは
2020-03-14 tajima Tajima Robotics
ロボットの姿勢(関節状態)によって、動作しやすい姿勢(方向)や動作しづらい姿勢(方向)が存在します。 これらのどれくらい自由にロボットを動かせるかという情報は …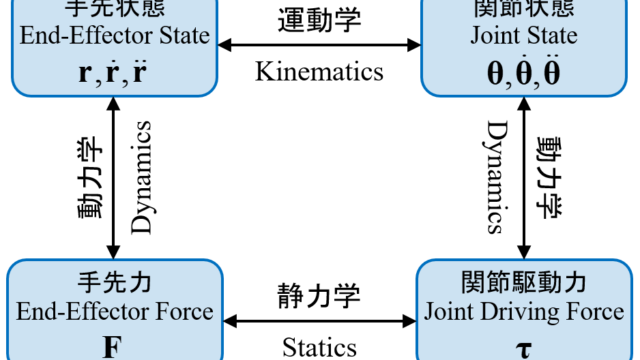 ロボット工学
ロボット工学ロボットの運動学・静力学・動力学を比較する
2020-03-05 tajima Tajima Robotics
ロボットを用いて様々な作業を行うことが可能になります。 これらの作業を正確に行うためには、ロボットを正確に制御する必要があります。 その正確な制御を実現 … 制御工学
制御工学速度比例制御系の特徴を伝達関数から理解する
2020-02-23 tajima Tajima Robotics
速度比例制御とは、比例器を用いた速度制御系のことです。 速度比例制御系を用いることで、目標速度を追従するように制御することが出来ます。 速度 … 制御工学速度比例制御:比例制御で速度をフィードバック制御する
2020-01-24 tajima Tajima Robotics
工作機械やロボットの速度制御系として、比例制御器を用いた速度比例制御があります。 また、以前の記事で紹介したカスケード …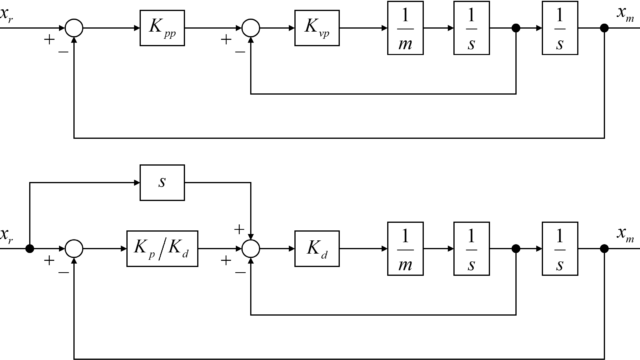 制御工学
制御工学カスケード型制御系とPD制御系のブロック線図を比較する
2019-12-17 tajima Tajima Robotics
工作機械やロボットの位置決め制御や送り制御に用いられる制御系として、カスケード型制御系があります。 また、位置制御と速 … 制御工学
制御工学カスケード型制御系の基本構成とフィードフォワード制御系とフィードバック制御系との比較
2019-11-04 tajima Tajima Robotics
ロボットや工作機械を制御するために、フィードフォワード制御系やフィードバック制御系など様々な制御系があります。 その中 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
