



 制御工学
制御工学システムの安定性:ラウス配列の特別な例
2018-03-06 tajima Tajima Robotics
ラウスの安定判別法を用いることで、ロボットなどの制御システムが安定か不安定かを判断することが出来ます。 前回の記事では、ラウスの安定判別法を用いるために必要な … 制御工学システムの安定性:ラウス・フルビッツの安定判別法(その2)
2018-03-05 tajima Tajima Robotics
ロボットなどを制御する際に重要な制御システムの安定性を判別する方法として、ラウス・フルビッツの安定判別法があります。 … 制御工学システムの安定性:ラウス・フルビッツの安定判別法
2018-03-04 tajima Tajima Robotics
ロボットなどのシステムの安定性を判別することは、ロボットなどを制御する際にとても重要です。 前回の記事では、システムが … 制御工学システムの安定性:安定なシステムとは
2018-03-03 tajima Tajima Robotics
ロボットなどのシステムを制御する際に、このシステムは安定なのか、または不安定なのかを確認することはとても重要です。 不安定なシステムを用いると、平衡な状態のシ …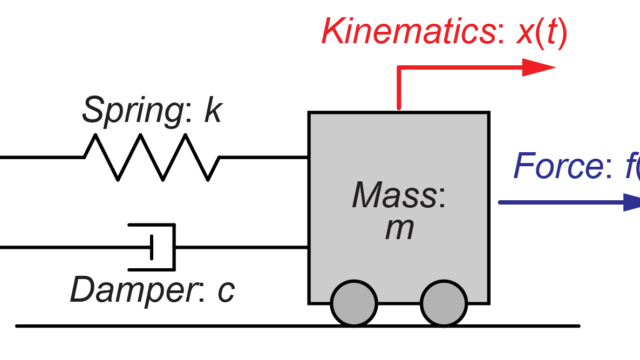 制御工学
制御工学質量‐ばね‐ダンパーシステムのステップ応答(その2)
2018-02-26 tajima Tajima Robotics
2次遅れ系システムの伝達関数を求めることで、その伝達関数からシステムのステップ応答の様子を算出することが出来ます。 前 … 制御工学質量‐ばね‐ダンパーシステムのステップ応答
2018-02-25 tajima Tajima Robotics
2次遅れ系システムの伝達関数を求めることで、その伝達関数からシステムのステップ応答の様子を算出することが出来ます。 今回は、質量とばね、ダンパーを含んだモデル … 制御工学2次遅れ系システムの伝達関数とステップ応答(その2)
2018-02-22 tajima Tajima Robotics
ロボットなどの動的システムを示す伝達関数を用いて、システムの入力に対するシステムの応答の様子を算出することが出来ます。 …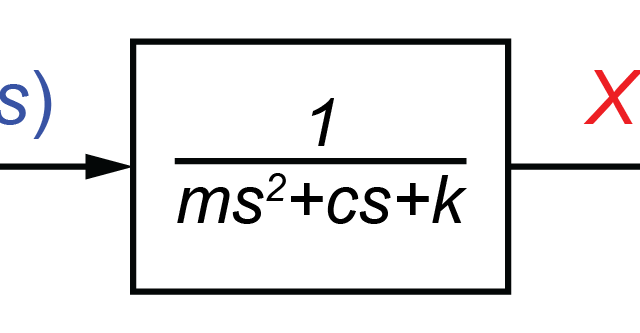 制御工学
制御工学2次遅れ系システムの伝達関数とステップ応答
2018-02-21 tajima Tajima Robotics
ロボットなどの動的システムを示す伝達関数を用いて、システムの入力に対するシステムの応答の様子を算出することが出来ます。 前回は、1次遅れ系システムについて、伝 … 制御工学1次遅れ系システムのステップ応答
2018-02-20 tajima Tajima Robotics
ロボットなどの動的システムを表した伝達関数から、システムの入力に対する応答を算出することが出来ます。 今回は、1次遅れ系システムについて、システムの伝達関数の …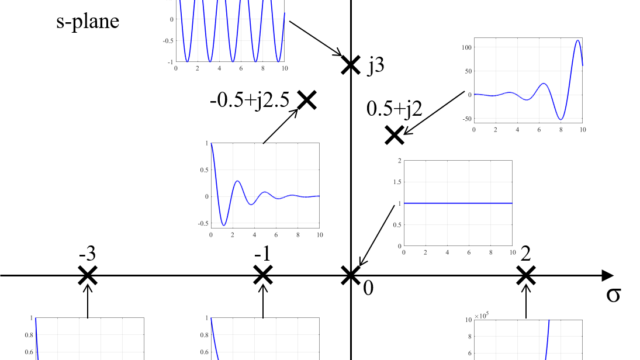 制御工学
制御工学伝達関数の極とインパルス応答
2018-02-18 tajima Tajima Robotics
複素平面上での伝達関数の極の位置から、システムのインパルス応答の様子を見ることが出来ます。 今回は、ロボットなどのシステムの伝達関数から求めた極を複素数平面上 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
