



 制御工学
制御工学複雑なフィードバックシステムの根軌跡を詳細に描く:複素極と軌跡の角度
2018-04-25 tajima Tajima Robotics
前々回、前回の記事では、単位フィードバックシステムの根軌跡を詳細に書くために必要となる情報を求める方法を紹介しました。 htt … 制御工学
制御工学複雑なフィードバックシステムの根軌跡を詳細に描く:虚軸との交点
2018-04-24 tajima Tajima Robotics
前回の記事では、複雑な単位フィードバックシステムの挙動を理解するために、詳細に根軌跡を書く方法を紹介しました。 https:/ … 制御工学
制御工学複雑なフィードバックシステムの根軌跡を詳細に描く:実軸からの分岐点
2018-04-23 tajima Tajima Robotics
これまでの記事では、複雑な単位フィードバックシステムの挙動を理解するために有効な手段である、根軌跡を書く方法を紹介しています。
… 制御工学
制御工学複雑なフィードバックシステムの根軌跡を詳細に描く
2018-04-22 tajima Tajima Robotics
根軌跡は複雑なフィードバックシステムを制御する際に適切なゲインを調整するために有効な方法です。 これまでの記事では、フ …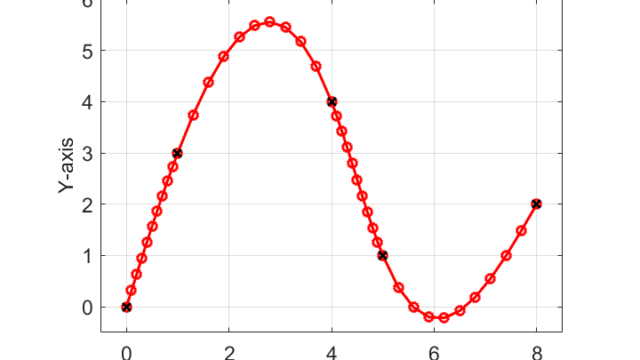 軌跡生成
軌跡生成3次スプライン補間で軌跡生成:連続的な軌跡を生成する(その2)
2018-04-21 tajima Tajima Robotics
3次スプライン補間を用いることで、離散的な指令値から連続的で滑らかな軌跡の生成を実現することが出来ます。 前回の記事で … 制御工学
制御工学3次スプライン補間で軌跡生成:連続的な軌跡を生成する(その1)
2018-04-20 tajima Tajima Robotics
前回までの記事では、3次スプライン補間に用いる3次多項式のパラメータを求める方法を紹介しました。 https://tajima … 軌跡生成3次スプライン補間で軌跡生成:3次多項式のパラメータを求める(その2)
2018-04-19 tajima Tajima Robotics
離散的な位置指令から3次スプライン補間を用いて連続的な軌跡を生成する方法を紹介します。 前回の記事では、3次スプライン … 軌跡生成3次スプライン補間で軌跡生成:3次多項式のパラメータを求める(その1)
2018-04-18 tajima Tajima Robotics
3次スプライン補間を用いた離散点から連続的な軌跡を生成する方法を紹介します。 前回の記事では、3次スプライン補間に用い … 軌跡生成3次スプライン補間で軌跡生成:3次多項式と補間条件
2018-04-17 tajima Tajima Robotics
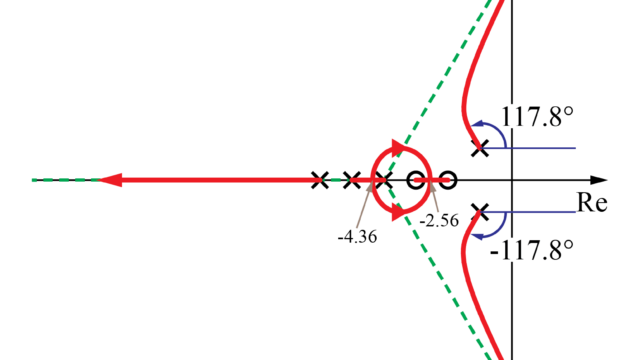
ロボットなどを動かす経路を指定する際に、通過してほしい点を離散的な指令点で指示することが多くあります。 この様な離散的 … 制御工学詳細な根軌跡を描く方法:複素極や複素零点と軌跡との角度を求める
2018-04-16 tajima Tajima Robotics
前回までの記事では、詳細な根軌跡を描くために必要となる情報として、実軸上から軌跡が分岐する点や軌跡と虚数軸との交点を求める方法を紹介 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
