

 ロボット技術
ロボット技術2自由度振動系の運動方程式を算出する!制御工学の基本知識
2020-08-11 tajima Tajima Robotics
本記事は、2自由度振動系で学ぶ制御工学入門の第2回です。 本シリーズでは、2自由度振動系の制御を通して制御工学の基礎知識を … ロボット技術
ロボット技術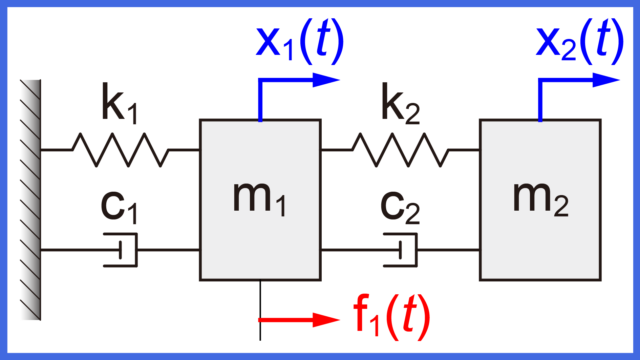 ロボット技術
ロボット技術 ロボット技術
ロボット技術 ロボット技術
ロボット技術 ロボット技術
ロボット技術 ロボット技術
ロボット技術 電子工作
電子工作 制御工学
制御工学 制御工学 制御工学 ロボット技術 ロボット技術 制御工学 制御工学 制御工学
制御工学 制御工学 ロボット技術 ロボット技術 制御工学 制御工学 制御工学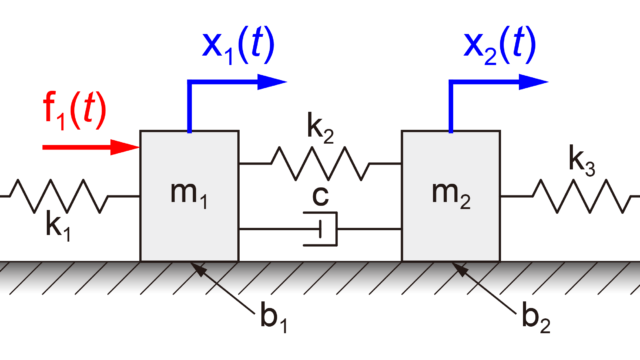 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学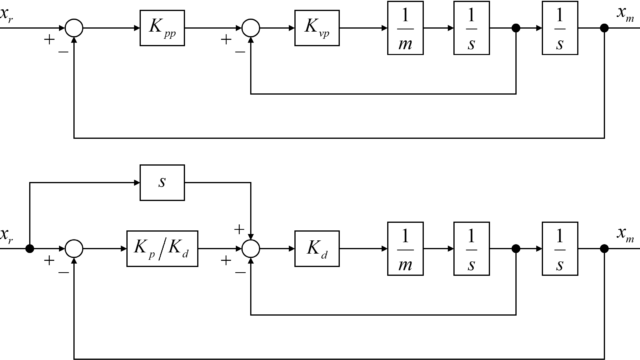 制御工学
制御工学 ロボット工学
ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成 軌跡生成
軌跡生成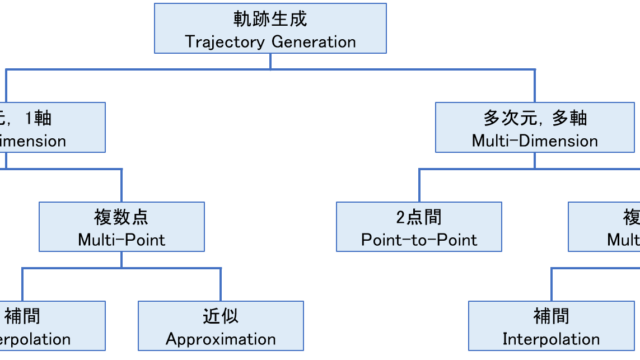 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成 ロボット技術
軌跡生成 ロボット技術 軌跡生成 ロボット技術
軌跡生成 ロボット技術



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
