


 制御工学
制御工学ラプラス変換を使って微分方程式を解く
2018-01-16 tajima Tajima Robotics
各時間\(t\)でのロボットの速度\(\dot{x}(t)\)や位置\(x(t)\)を求めたり、目標通りに制御するために、微分方程式(Differential Equati … 制御工学
制御工学 軌跡生成
軌跡生成 軌跡生成
軌跡生成 軌跡生成
軌跡生成 軌跡生成
軌跡生成 軌跡生成
軌跡生成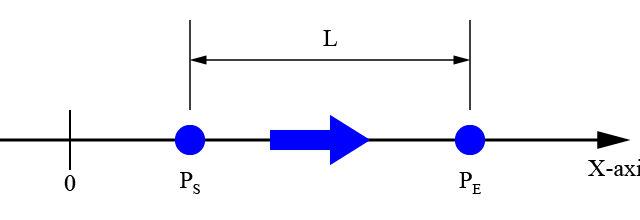 軌跡生成
軌跡生成 ロボット工学
ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット技術
ロボット技術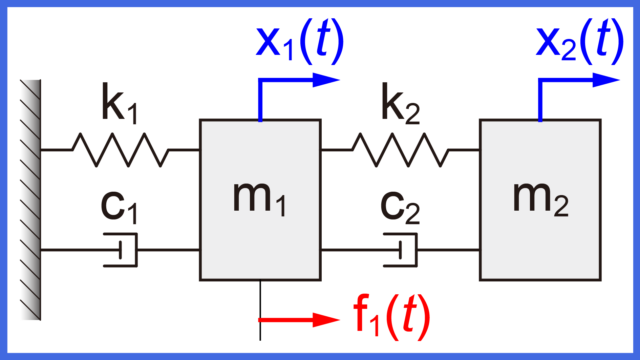 ロボット技術
ロボット技術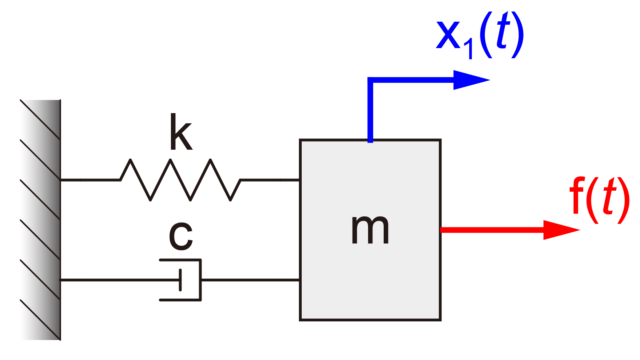 制御工学
制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学
制御工学 ロボット工学
ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成 ロボット技術
軌跡生成 ロボット技術 軌跡生成 ロボット技術
軌跡生成 ロボット技術



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
