


 軌跡生成
軌跡生成Bスプライン曲線を使ってロボットの軌跡生成をしてみよう!(その2)
2018-07-28 tajima Tajima Robotics
前回の記事から、Bスプライン曲線を用いた離散的で不連続な指令点を連続で滑らかに補間する方法を紹介しています。 https:// … 軌跡生成
軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 自動運転車 自動運転車
自動運転車 自動運転車 自動運転車 自動運転車
自動運転車 自動運転車 自動運転車
自動運転車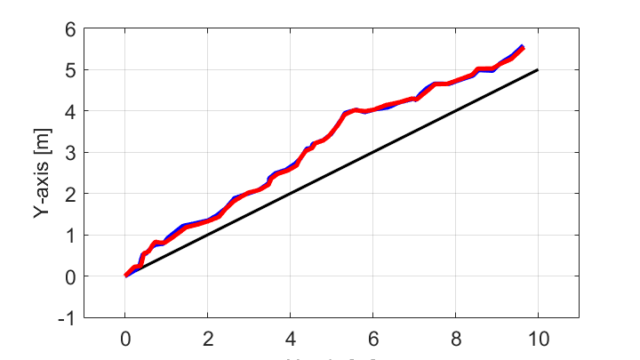 自動運転車 自動運転車
自動運転車 自動運転車 ロボット技術
ロボット技術 ロボット技術
ロボット技術 制御工学
制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学
制御工学 ロボット工学
ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成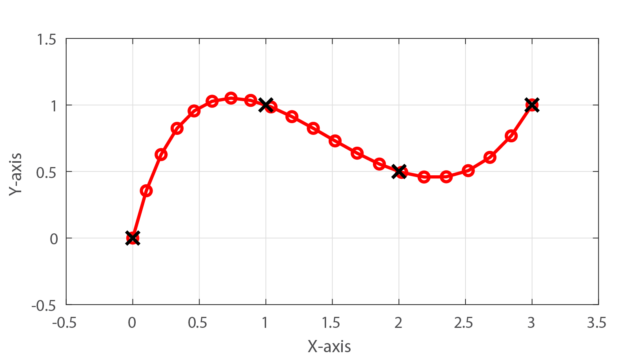 軌跡生成 ロボット技術
軌跡生成 ロボット技術 軌跡生成 ロボット技術
軌跡生成 ロボット技術



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
