


 制御工学
制御工学実際に伝達関数からボード線図を漸近線近似で書いてみよう(その2)
2018-05-08 tajima Tajima Robotics
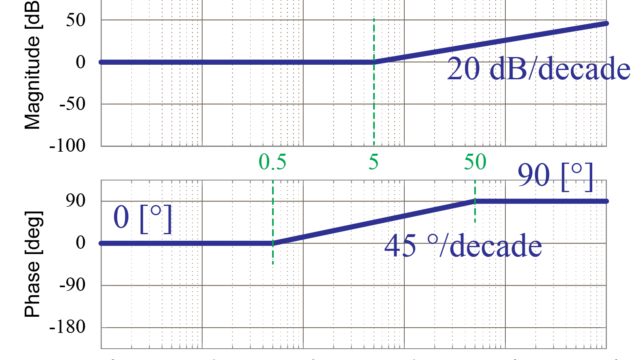
ロボットや工作機械などのシステムの伝達関数からボード線図を書く方法を紹介しています。 前回の記事では、与えられた伝達関 … 制御工学
制御工学 制御工学
制御工学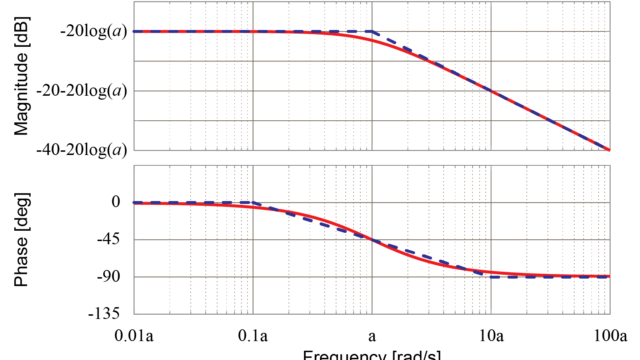 制御工学
制御工学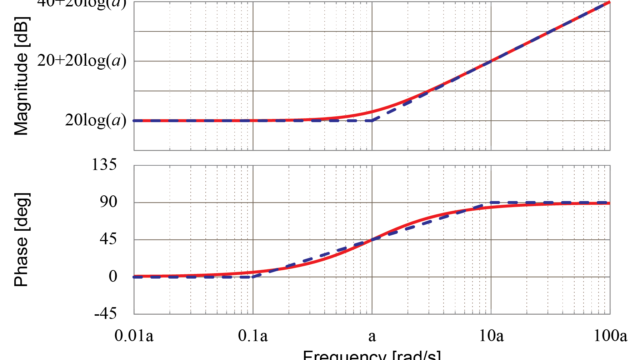 制御工学
制御工学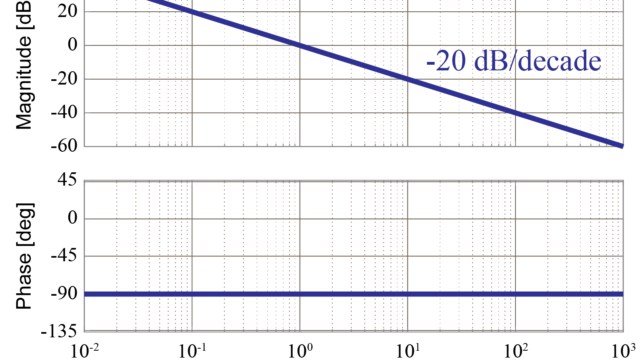 制御工学
制御工学 制御工学
制御工学 制御工学
制御工学 制御工学
制御工学 制御工学 軌跡生成
制御工学 軌跡生成 ロボット技術
ロボット技術 ロボット技術
ロボット技術 制御工学
制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学
制御工学 ロボット工学
ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成 ロボット技術
軌跡生成 ロボット技術 軌跡生成 ロボット技術
軌跡生成 ロボット技術



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
