


 制御工学
制御工学PID制御とシステムの安定性:フィードバックシステムを安定にPD制御する
2018-03-28 tajima Tajima Robotics
前回の記事では、P制御を用いて制御対象の3次系システムをフィードバック制御する際に、システムの安定性を保てる制御系内のゲインの範囲を … 制御工学
制御工学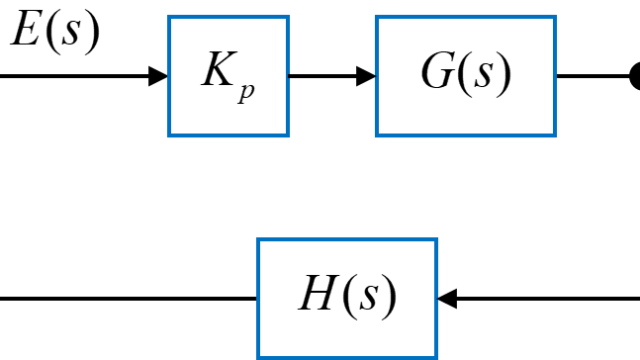 制御工学
制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学
制御工学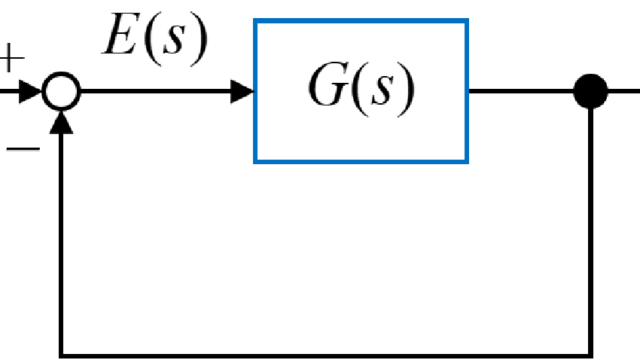 制御工学
制御工学 制御工学
制御工学 制御工学
制御工学 ロボット技術
ロボット技術 ロボット技術
ロボット技術 制御工学
制御工学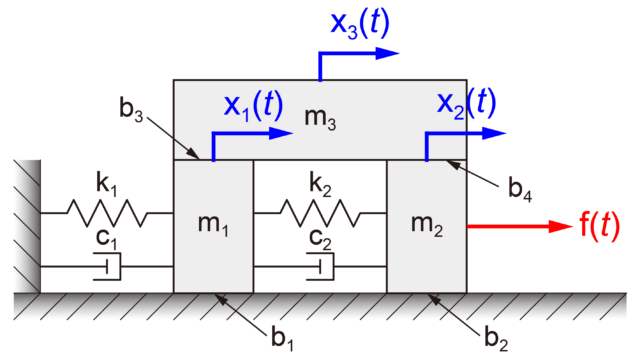 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学
制御工学 ロボット工学
ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成 ロボット技術
軌跡生成 ロボット技術 軌跡生成 ロボット技術
軌跡生成 ロボット技術



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
