


 制御工学
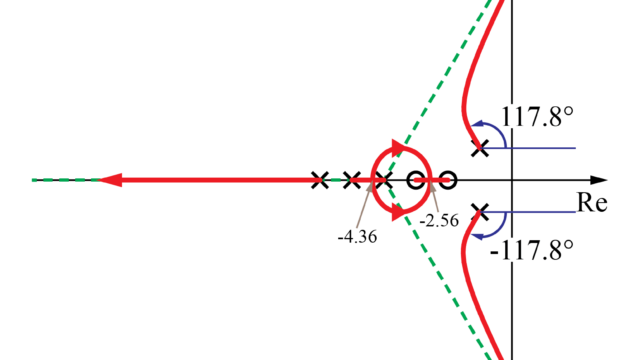
制御工学複雑なフィードバックシステムの根軌跡を詳細に描く:複素極と軌跡の角度
2018-04-25 tajima Tajima Robotics
前々回、前回の記事では、単位フィードバックシステムの根軌跡を詳細に書くために必要となる情報を求める方法を紹介しました。 htt … 制御工学
制御工学 制御工学
制御工学 制御工学
制御工学 制御工学
制御工学 軌跡生成
軌跡生成 制御工学 軌跡生成 軌跡生成 軌跡生成 制御工学
制御工学 軌跡生成 軌跡生成 軌跡生成 制御工学 ロボット技術
ロボット技術 ロボット技術
ロボット技術 制御工学
制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学 制御工学
制御工学 制御工学 制御工学
制御工学 ロボット工学
ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成
ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 ロボット工学 軌跡生成 軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成
軌跡生成 軌跡生成 軌跡生成 ロボット技術
軌跡生成 ロボット技術 軌跡生成 ロボット技術
軌跡生成 ロボット技術



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
